Submitted by guitar-list on
Project:
Step number:
4
Instructions:
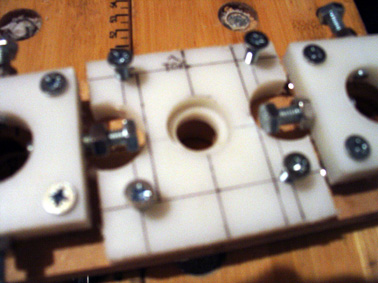
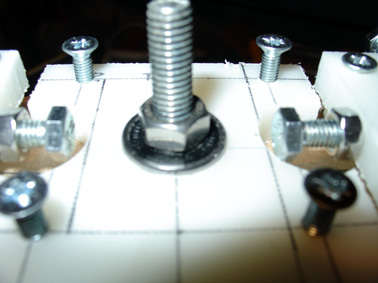
The plans are not very clear how the leadscrew should be supported or connected to the motors. I have decided to use the same skateboard bearings for the leadscrew bearing. These bearings are really designed to take forces perpendicular to the axis of rotation, but can deal with some force along the axis of rotation (like thrust bearings). The bearings are mounted in a square of HDPE plastic. The holes in the bearing mount are spaced using the NEMA 23 motor specification to allow the stepper motors to be attached eventually.




{kind=link}
{kind=link}